Navigasjon i 2026 er ikke lenger en passiv tjeneste, men en aktiv teknologisk kamp. For å garantere sikkerhet til sjøs og i luften, er det ikke lenger nok å eie en GPS – du må forstå de usynlige mekanismene som skiller en korrekt posisjon fra en livsfarlig systemløgn.
Dette tekniske appendixet dekonstruerer GNSS-kjeden fra Einsteins relativitetsteori til de brutale realitetene i moderne elektronisk krigføring. Gjennom ni kapitler går vi bak kartplotterens grafikk for å analysere signalbehandling, sensor-fusjon og de geopolitiske strategiene som sikrer teknologisk autonomi når internasjonale konstellasjoner utfordres.
Designet som et teknisk dypdykk for ETO-er, navigatører og ingeniører, fungerer denne artikkelen som en utvidelse av vår operative guide til GNSS/GPS. Her finner du den matematiske dybden, den tekniske integrasjonen av redundante systemer og den strategiske innsikten som kreves for å operere trygt i dagens komplekse signalmiljø.

WGS84, Geoiden og ondulasjonsformelen.
CDMA, PRN-koder og autokorrelasjon.
Ionosfærisk dispersjon og feilkilder.
RAIM-statistikk og Kalman-filteret.
Jamming, Spoofing og CRPA-antenne.
Tidsdilatasjon og Einsteins korreksjoner.
INS, SLAM og LEO-navigasjon.
Norge vs. EU og sensor-fusjon.
Risikoanalyse og lag-på-lag sikkerhet.
Hvorfor din GPS egentlig er "blind" for fjell og hav, og hvorfor "høyde" er mer komplisert enn du tror.
Når du bruker en GPS eller andre satellittsystemer (GNSS), ser de ikke verden slik vi gjør. Satellittene aner ikke hvor havnivået er, de ser ikke fjelltopper, og de forstår ikke hva terreng er. For en satellitt er jorda bare et sett med matematiske punkter i et tomt rom.
For at en GPS-mottaker skal kunne fortelle deg noe nyttig – som for eksempel hvor høyt over havet du befinner deg – må den gjøre en komplisert oversettelse. Den må koble sammen den rene matematikken fra verdensrommet med den fysiske virkeligheten her nede på bakken. Hvis denne "oversettelsen" blir feil, kan det få store konsekvenser for alt fra selvkjørende biler til flytrafikk og skip.
For å få regnestykket til å gå opp, må vi forholde oss til tre forskjellige versjoner av jorda samtidig:
GPS-mottakeren din måler i utgangspunktet bare avstanden til den glatte "matte-ballen" (ellipsoiden). Dette kaller vi ellipsoidisk høyde (h). Problemet er at denne høyden ikke bryr seg om hvor havet faktisk er.
Forskjellen mellom den glatte matte-modellen og det sanne havnivået (geoiden) kalles for geoidens ondulasjon (N). Dette er rett og slett et tall på hvor mye havnivået "buler" ut eller inn i forhold til matematikken. Noen steder på jorda kan denne forskjellen være over 100 meter!
For å finne din virkelige høyde over havet, må vi bruke denne enkle, men kritiske formelen:
Fra teori til virkelighet:
Tenk deg et fly som skal lande i tåke. Hvis instrumentene bare bruker GPS-ens "matte-høyde" uten å ta hensyn til de lokale variasjonene i tyngdekraften, kan flyet tro det er 50 meter høyere oppe enn det faktisk er.
Når du ser en kartplotter vise en negativ høyde selv om du står på tørt land, er det ofte ikke GPS-en som er ødelagt. Det betyr bare at "matte-modellen" akkurat der ligger lavere enn det virkelige havnivået. Den største faren i moderne navigasjon er ikke teknisk svikt, men at brukeren stoler blindt på tallene uten å vite hvilken "høyde" som faktisk vises.
Kunsten å høre et hvisk i en orkan av støy.
I radioteknikk tenker vi ofte at styrke er alt. Men når det kommer til satellitter, må vi lære å lytte etter det nesten umulige. Når signalet fra en satellitt over 20 000 km ute i rommet treffer antennen din, er det så svakt at det fysisk sett drukner i bakgrunnsstøyen. Det er som å prøve å høre en person hviske i den andre enden av en fullsatt fotballstadion mens alle andre roper.
Et tankeeksperiment:
For å forstå hvor utrolig lite energi vi snakker om: Signalet fra en GPS-satellitt tilsvarer å prøve å fange opp lyset fra en 25 watts lyspære som befinner seg over 20 000 kilometer unna. Det krever en ekstrem følsomhet for å i det hele tatt registrere at lyspæren er tent, enn si å lese informasjonen den sender.
Rent teknisk har signalet en styrke på ca. -160 dBW når det når jordoverflaten. Dette er langt under det naturlige støygulvet i mottakeren. For en vanlig radiomottaker er signalet helt usynlig – det finnes rett og slett ikke nok "kraft" i bølgene til å skille dem fra tilfeldig radiostøy uten hjelp av avansert matematikk og smarte koder.
Siden alle GPS-satellitter sender på samme frekvens, skulle man tro de overdøvet hverandre fullstendig. Løsningen er CDMA (Code Division Multiple Access). Tenk på det som et rom fullt av mennesker som snakker samtidig, men hver satellitt snakker sitt eget unike språk som mottakeren din kan kjenne igjen.
Hver satellitt sender ut en unik "støykode" kalt en PRN-kode. Mottakeren din har en nøyaktig kopi av alle disse kodene lagret. Ved å "skyve" sin egen kopi over støyen som kommer inn, kan den kjenne igjen mønsteret. I det øyeblikket de to mønstrene matcher perfekt, skjer det en matematisk forsterkning. Signalet trer plutselig frem fra støyen med klar tydelighet.
Hvorfor fungerer dette så bra? Det skyldes Processing Gain. Ved å spre informasjonen utover og deretter samle den igjen i mottakeren, oppnår vi en enorm forsterkning uten å bruke mer strøm. Denne gevinsten fungerer som et filter som kaster bort alt som ikke passer med satellittens unike rytme.
Denne gevinsten på ca. 43 dB er selve årsaken til at GPS fungerer. Uten denne matematiske operasjonen ville du trengt en enorm parabolantenne for å motta signalene. I stedet kan vi bruke den lille antennen din, takket være ren regnekraft.
De fleste mottakere måler avstanden ved å se på selve koden vi snakket om over. Men hver bit i koden er ca. 300 meter lang. For å få millimeter-presisjon, må vi måle selve radiobølgen signalet reiser på.
Bølgelengden til signalet er bare ca. 19 cm. Ved å telle antall bølger mellom deg og satellitten kan vi bli ekstremt nøyaktige. Men her møter vi en utfordring: Integer Ambiguity (heltallsuklarhet). Siden alle radiobølger ser like ut, vet ikke mottakeren i starten om det er 100 000 000 eller 100 000 001 bølger mellom deg og rommet. Det er som å måle med en linjal uten tall – du ser strekene, men du vet ikke nøyaktig hvor på linjalen du befinner deg før gåten er løst.
Hvorfor dette er viktig i praksis:
Siden vi er helt avhengige av å kjenne igjen et ekstremt svakt mønster, er systemet sårbart for jamming. Hvis noen sender ut radiostøy på samme frekvens, øker støygulvet rundt antennen din. Det blir som om et band på stadion begynner å spille enda høyere – til slutt klarer du ikke lenger å høre hva personen i den andre enden hvisker.
Dette er grunnen til at man må være bevisst på antenneplassering og skjerming. I kritiske operasjoner må vi ofte støtte oss på reservesystemer som treghetsnavigasjon (INS), som fungerer uavhengig av de svake signalene fra verdensrommet.

Når lysets hastighet ikke lenger er konstant og atmosfæren spiller spill.
I teorien er GPS-måling enkel matematikk: Avstand = Tid × Hastighet. Men i virkeligheten er ikke lysets hastighet en konstant gjennom hele reisen fra rommet. Mellom 50 km og 1000 km over hodet ditt blir signalet bremset, bøyd og strukket av atmosfæren. For å forstå hvorfor posisjonen din hopper, må vi se på de kreftene som forstyrrer signalet på vei ned til antennen din.
Ionosfæren er et lag av elektrisk ladet gass (plasma). Dette laget er dispersivt. At et medium er dispersivt betyr enkelt forklart at forskjellige frekvenser beveger seg med forskjellig hastighet gjennom det. Tenk på det som en gruppe mennesker som løper gjennom vann; de høye og sterke løper raskere enn de lave.
Dette er den største feilkilden i hele systemet og kan gi avvik på opptil 50 meter. For å beregne nøyaktig hvor mye signalet blir forsinket, bruker vi denne sammenhengen:
Slik skal du lese formelen: Forsinkelsen (dion) styres av to ting. For det første f² (frekvensen i annen). Siden frekvensen står under brøkstreken, betyr det at jo lavere frekvensen er, desto større blir forsinkelsen. For det andre har vi TEC (Total Electron Content), som er mengden "motstand" i luften. Når solen er aktiv, øker TEC, og bremsen blir kraftigere.
Løsningen for profesjonelt utstyr er å lytte på to kanaler samtidig: L1 (1575,42 MHz) og L2 (1227,60 MHz). Siden vi vet nøyaktig hvordan disse to frekvensene bremses ulikt i det dispersive mediet, kan mottakeren regne seg bakover og eliminere nesten hele feilen.
Troposfæren er det laget av atmosfæren vi faktisk lever og puster i (0–50 km). Her møter vi en ny utfordring: I motsetning til ionosfæren, er troposfæren ikke-dispersiv. Det betyr at alle radiobølger bremses likt, uansett frekvens. Derfor hjelper det ikke å bruke både L1 og L2 her. Forsinkelsen deles i to:
DGPS (Differensiell GPS) ble skapt for å fjerne disse atmosfæriske feilene ved bruk av bakkebaserte referansestasjoner. Ved å plassere en basestasjon på et punkt med nøyaktig kjente koordinater, kan den sammenligne "fasiten" med det GPS-satellittene sier. Differansen sendes ut som en korreksjon til skip i nærheten. Men ser vi på dekningskartet i dag, ser vi et dramatisk bilde av en teknologi på vei ut.
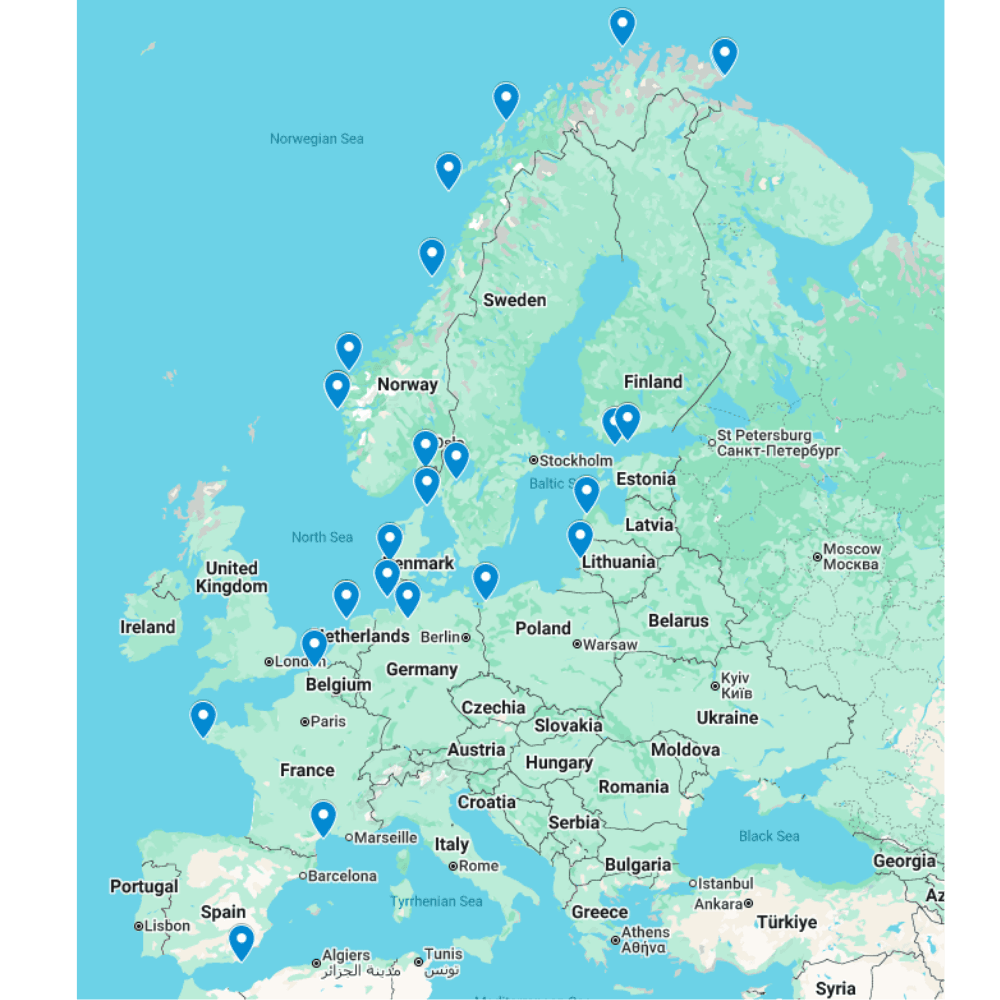
Bildet reflekterer offisielle IALA-tabeller. Merk de store hullene i Nordsjøbassenget og den varslede utfasingen:
| Område | Status | Frekvenser |
|---|---|---|
| Norge | Utfasing påbegynt 2026 | 291.5 – 311.5 kHz |
| Storbritannia / Irland | Nedlagt (2022) | - |
Det er to hovedårsaker til at de tradisjonelle mastene langs kysten forsvinner. For det første har vi fått SBAS (EGNOS i Europa), som sender korreksjonsdata via satellitter. Dette fjerner behovet for dyrt vedlikehold av master på land. For det andre har vi sett en romlig dekorrelasjon; en DGPS-stasjon fungerer bare optimalt innenfor 200 km. I moderne skipsfart er dette for begrensende sammenlignet med de globale, satellittbaserte systemene.
Effekten av DGPS avtar jo lenger unna basestasjonen du kommer. Mens norskekysten har hatt tett dekning for å håndtere multipath i fjordstrøk, tvinger dekningshullet på britisk side nå skip i havgående trafikk over på EGNOS eller kommersielle løsninger.
Hva du må passe på ved installasjon:
Multipath oppstår når signalet reflekteres via skipets struktur (master/kraner). Mottakeren blir "lurt" fordi signalet har reist en lengre vei. Dette er grunnen til at dekningskartet langs norskekysten historisk har vært så tett; i trange farvann må vi eliminere selv de minste reflekterte forsinkelsene.
Tips: Sett en elevation mask på 10–15°. Dette tvinger mottakeren til å ignorere satellitter som står lavt i horisonten, hvor signalet har størst risiko for både atmosfærisk forstyrrelse og refleksjoner fra skipskonstruksjonen.
Kunsten å vite når man skal slutte å stole på teknologien.
Tenk deg at du står på broen i tett tåke. Du ser på kartplotteren, og symbolet for skipet ditt ligger trygt midt i leia. Men hva om skjermen lyver? I navigasjonens verden er det én ting som er langt farligere enn å miste posisjonen helt: Å ha en feil posisjon uten å vite om det.
Dette kalles et Silent Failure, eller "den tause svikten". For å bekjempe dette bygger vi sofistikerte statistiske vaktbikkjer inne i mottakerne som kontinuerlig overvåker to ting: Satellittenes geometri og dataenes konsistens.
Mange navigatører ser på HDOP (Horizontal Dilution of Precision) som en generell "kvalitetsmåler", men tallet har en helt spesifikk betydning: Det er una multiplikator for usikkerhet. HDOP forteller oss hvor mye feilkildene vi lærte om i kapittel 3 (atmosfære, klokkefeil, støy) blir forsterket på grunn av hvordan satellittene står på himmelen.
Hvorfor varierer HDOP? To konkrete eksempler:
Nøyaktigheten din kan beregnes med denne formelen:
Eksempel i tall: Hvis atmosfæren og mottakerstøy gir en grunnleggende usikkerhet (UERE) på 5 meter:
• Ved HDOP 1.0 er nøyaktigheten 5 meter.
• Ved HDOP 4.0 (dårlig geometri) er nøyaktigheten plutselig 20 meter.
Signalstyrken kan være identisk i begge tilfeller, men geometrien gjør forskjellen på trygg seilas og grunnstøting.
Mens HDOP forteller oss om geometrisk styrke, handler RAIM (Receiver Autonomous Integrity Monitoring) om tillit gjennom redundans. RAIM fungerer som en intern demokratisk prosess. For å få en posisjon trenger du 4 satellitter, men for at RAIM skal kunne detektere at en satellitt sender ut feilaktige data, kreves det minst 5.
Dersom du har 6 eller flere satellitter, kan systemet utføre FDE (Fault Detection and Exclusion). Algoritmen beregner posisjonen din mange ganger ved å utelate én og én satellitt fra regnestykket. Hvis alle beregningene peker på samme punkt, bortsett fra den gruppen der "Satellitt X" er utelatt, har systemet funnet synderen. Den korrupte satellitten kastes ut av regnestykket umiddelbart.
Rå GPS-posisjoner er urolige. Her kommer Kalman-filteret inn. Det fungerer som skipets "hjerne" som forstår fysikk. Filteret vet at et skip på 150 meter ikke kan flytte seg 30 meter sidelengs på et kvart sekund.
Hemmeligheten ligger i Kalman Gain (Kk). Filteret veier din forventede posisjon (x̂k-) opp mot den nye målingen (zk). Hvis HDOP er lav og alt virker normalt, stoler filteret på GPS-en. Men hvis HDOP skyter i været eller støyen øker, vil K synke. Da stoler filteret mer på skipets egen bevegelsesmodell (inerti) for å "ri av stormen" til signalene blir gode igjen.
Vær kritisk til "pene" plott:
Moderne maritime mottakere er ekstremt gode til å skjule feil. De bruker Kalman-filteret til å tegne en glatt og stabil linje selv når satellittdataene er kaotiske. Dette gir en falsk trygghetsfølelse.
Proff-tips: Ha alltid et statusvindu åpent som viser HDOP og antall satellitter i bruk. Hvis HDOP vandrer over 2.0 i åpent farvann, eller hvis antallet satellitter plutselig faller, er det et tegn på at integritetsarkitekturen din er under press. Ved spoofing kan HDOP se perfekt ut, men RAIM-alarmen vil ofte være det eneste tegnet på at noe er galt.


Når den blå prikken blir et mål for elektronisk krigføring.
I de forrige kapitlene har vi sett på hvordan naturen og matematikken kan skape utfordringer for navigasjonen. Nå skal vi over i et langt mørkere landskap. Vi skal se på de menneskeskapte forstyrrelsene som har forvandlet deler av verdens havområder – inkludert våre egne nordområder – til en digital slagmark.
Hvorfor ønsker noen å slå ut GNSS? Svaret er enkelt: Navigasjonssuperioritet. Moderne krigføring er helt avhengig av presisjon. Hvis du kan blinde fiendens missiler, droner og logistikkjede ved å manipulere tids- og posisjonssignalene deres, har du vunnet halvparten av slaget uten å avfyre et skudd.
Intensjonen med elektronisk krigføring mot GNSS er enten nektelse (jamming), der man lager så mye støy at utstyret blir ubrukelig, eller bedrag (spoofing), der man lurer fienden til å tro at de er et annet sted enn de faktisk er.
Jamming er brute-force metoden. Det tilsvarer å stå rett ved siden av noen som prøver å lytte til en hvisking, og skrike dem inn i øret med en megafon. Effektiviteten måles ofte med Jamming-to-Signal ratio (J/S). Siden GPS-signaler er ekstremt svake når de når jorden, skal det forbløffende lite støy til for å "overdøve" dem.
Du har kanskje lagt merke til at utstyret ditt mister L1-signalet først, mens L2 (eller L5) noen ganger holder ut lenger. Dette skyldes primært prioritering og fysikk:
I Ukraina ser vi i dag den mest omfattende bruken av jamming i historien. Russiske systemer som R-330ZH Zhitel eller Pole-21 er i stand til å "vaske ut" signaler i en radius på flere mil. Dette tvinger droner til å navigere etter visuelle landemerker i stedet for koordinater.
Her hjemme har vi opplevd lignende tilstander i Øst-Finnmark under militærøvelser. Dette er ofte "oversmitte" fra kraftige militære jammere brukt for å beskytte egne baser. For de som vil se teknologien bak, kan man studere utstyr som den bærbare "DroneGun" eller analyser fra C4ADS som sporer disse forstyrrelsene globalt.
Når støyen er overalt, trenger vi en antenne som kan "lukke ørene" i retningen støyen kommer fra. Dette er CRPA (Controlled Reception Pattern Antennas). Ved å sammenligne fasen på signalet mellom flere små antenneelementer, kan prosessoren lage et digitalt "nullpunkt" i retning av jammeren.
Konkrete eksempler på CRPA-teknologi:
• NovAtel GAJT-710ML: En mye brukt anti-jam-løsning for maritime fartøy.
• Infinidome GPSdome: En mindre enhet for ettermontering på eksisterende GPS-antenner.
Den største faren er ikke når GPS-en faller ut (rød alarm), men når den blir spoofet. Dette skaper kritiske risikomomenter:
AIS vs. Radar vs. Virkeligheten:
Konkrete tiltak for navigatøren:
Når tid blir en variabel i navigasjonsligningen.
Relativitetsteorien til Albert Einstein kan virke som noe som hører hjemme i sci-fi-filmer eller støvete fysikkbøker, men sannheten er at GNSS-mottakeren din ikke ville fungert i fem minutter uten den. Siden vi måler avstand ved hjelp av tid, og lyset beveger seg med utrolige 300 000 km/s, blir tidens flyt helt avgjørende. Hvis klokkene i rommet og klokkene på jorda ikke er helt i takt, vil posisjonen din "skli" bortover kartet i et rasende tempo.
Det er to ulike effekter som kriger om å endre tiden for en satellitt:
1. Spesiell relativitet (Hastighet): GPS-satellitter suser rundt jorda i 14 000 km/t. Einstein lærte oss at jo fortere du beveger deg, jo saktere går tiden for deg relativt til de som står stille. For satellitten betyr dette at atomklokkene om bord taper ca. 7 mikrosekunder per døgn.
2. Generell relativitet (Gravitasjon): Her blir det virkelig merkelig. Tid går saktere jo nærmere du er en stor masse (som jorda). Siden satellittene befinner seg 20 200 km ute i rommet, er gravitasjonen der mye svakere enn nede ved havoverflaten. Derfor går klokkene i rommet faktisk for fort sammenlignet med våre – hele 45 mikrosekunder per døgn.
Nettoregnestykket for en satellitt:
Δtnetto = 45 μs - 7 μs = 38 μs per døgnUten å korrigere for disse 38 mikrosekundene, ville GPS-posisjonen din ha feilet med over 10 kilometer hver eneste dag. Etter en uke ville du trodd du var i en annen by.
For at dette skal fungere, trenger vi ekstremt nøyaktige klokker.
Når du starter en løpetur med smartklokken din, har den et problem: Den vet ikke nøyaktig hva klokka er (i GNSS-forstand), og den har bare en unøyaktig kvartskrystall.
Løsningen: Den fjerde satellitten
For å finne din posisjon i 3D (lengde, bredde, høyde) trenger du egentlig bare tre satellitter. Men klokken din krever en fjerde satellitt. Denne brukes utelukkende til å synkronisere den billige kvartskrystallen din med atomurene i rommet.
I praksis "låner" klokken din nøyaktigheten til atomurene. Med en gang den får kontakt med nok satellitter, blir den billige klokken på håndleddet ditt forvandlet til et presisjonsinstrument som er synkronisert med verdensbanken, strømnettet og resten av den globale infrastrukturen.
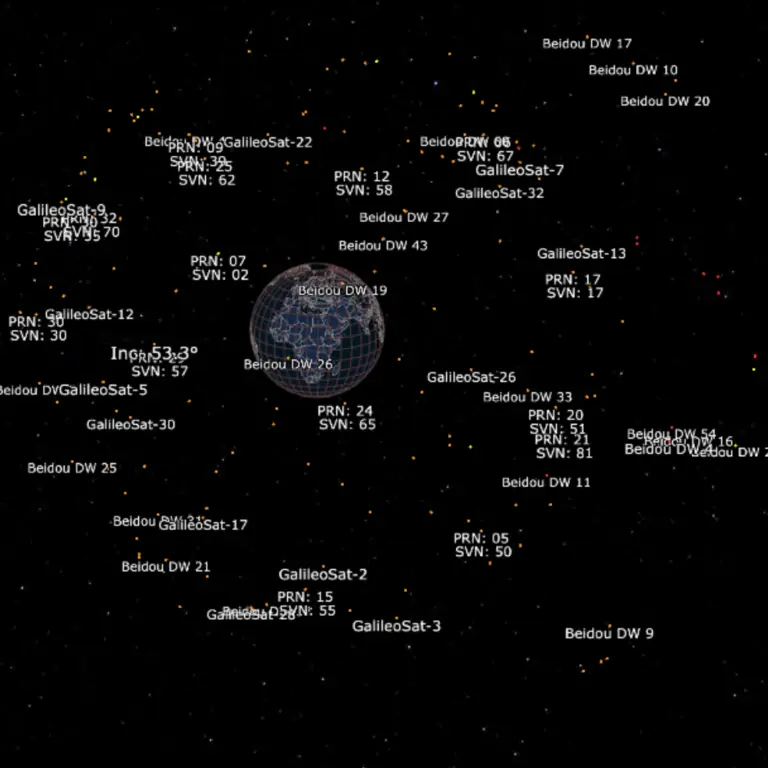
Robust posisjonsbestemmelse via lavbane-konstellasjoner.
Tradisjonelle GNSS-systemer i Medium Earth Orbit (MEO), som GPS og Galileo, opererer ca. 20 200 km over jordoverflaten. På denne avstanden er signalveistapet betydelig; signalet som når en mottaker på jorden er ekstremt svakt. Tenk på det som en lommelykt som lyser fra en fjelltopp mange mil unna – lysstyrken som når deg er marginal, noe som gjør signalet sårbart for både atmosfæriske forstyrrelser og tilsiktet jamming.
Fremtidens navigasjonsinfrastruktur utvides nå med LEO (Low Earth Orbit)-satellitter i baner mellom 500 og 1200 km. Denne teknologiske overgangen representerer et paradigmeskifte for maritim sikkerhet og signalintegritet.
I motsetning til fjerne MEO-satellitter, gir den lave banehøyden tre kritiske tekniske fordeler:
Navigasjonssikkerhet handler i økende grad om sensorfusjon eller Tight Coupling. Dette innebærer at GNSS-mottakeren integreres sømløst med fartøyets IMU (Inertial Measurement Units) – høypresisjons akselerometre og gyroskoper.
Dersom satellittsignalet blokkeres midlertidig av fysiske hindringer eller jamming, vil ikke systemet miste posisjonsløsningen. I stedet benyttes treghetsdata for å matematisk beregne fartøyets bane (Dead Reckoning) med ekstrem nøyaktighet i de kritiske sekundene signalet er fraværende. Når signalet gjenopprettes, synkroniseres dataene umiddelbart for å korrigere eventuell drift.

Fra isolerte sensorer til integrert integritet.
Når vi beveger oss fra teori til praktisk anvendelse, ser vi et radikalt teknologisk skifte. Det er ikke lenger tilstrekkelig å betrakte GNSS som en isolert kilde til posisjon. For å sikre at kritiske operasjoner i norske farvann opprettholdes i et stadig mer krevende signalmiljø, må vi implementere en "symfoni" av ulike teknologier. Dette handler ikke lenger kun om navigasjon, men om operativ overlevelsesevne i en digital tidsalder.
Moderne maritim navigasjon baserer seg på sensorfusjon, ofte teknisk referert til som Tight Coupling. Konseptet kan sammenlignes med det menneskelige sanseapparatet: Vi bruker syn, hørsel og balansenerven i kombinasjon for å navigere. Dersom én sans svekkes, tar de andre over for å opprettholde likevekten.
I teknisk sammenheng betyr dette at GNSS-data integreres direkte med fartøyets IMU (Inertial Measurement Units) som måler akselerasjon og rotasjonshastighet. Dersom satellittsignalet faller ut eller degraderes, vil systemet kontinuerlig beregne posisjonen basert på fartøyets faktiske bevegelser. Denne integrasjonen skaper en robusthet som tåler både naturlige atmosfæriske forstyrrelser og bevisst jamming.
For å bygge en trygg bro mellom teori og praksis, tar vi i bruk spesifikke teknologier som er tilpasset de unike utfordringene i nordområdene:
Aktører som Starlink (SpaceX) har nylig endret spillereglene ved å bygge ut massive konstellasjoner i lav jordbane (LEO). Opprinnelig utviklet for datakommunikasjon, implementerer disse nå egne posisjons- og tidstjenester som fungerer uavhengig av militær infrastruktur.
Denne uavhengigheten er strategisk viktig av flere grunner: For det første gir det en alternativ kilde til posisjon ("Plan B") dersom tradisjonelle MEO-systemer skulle bli kompromittert i en konflikt. For det andre muliggjør de nære satellittene en kryptering og signalstyrke som gjør tradisjonell elektronisk krigføring langt mindre effektiv.
Sikkerhetsstyring i et sårbart teknologisk og geopolitisk landskap.
GNSS er i dag definert som kritisk infrastruktur. I en idealisert verden er disse signalene en gave til menneskeheten, men i realiteten fungerer de også som geopolitiske maktverktøy. Strategisk autonomi handler om hvem som kontrollerer tilgangen til posisjonsdata, og om vi i Europa og Norge kan opprettholde operativ kontinuitet i krisesituasjoner.
Historisk har sivil navigasjon vært avhengig av militært kontrollerte systemer som amerikanske GPS. Dette medfører en sårbarhet dersom nasjonale militære behov prioriteres over sivil nøyaktighet i en konfliktsituasjon.
Dette er fundamentet for det europeiske Galileo-systemet. Galileo skiller seg ut ved å være underlagt sivilt eierskap. For norske maritime aktører gir dette en garanti for autonomi; en digital livline styrt av internasjonale avtaler og sivile behov fremfor ensidig militær strategi.
I tråd med prinsippene i ISO 31000 (Risikostyring), må moderne navigasjon baseres på en "Defense in Depth"-strategi. Dersom det primære laget (GNSS) kompromitteres, skal sekundære systemer automatisk overta for å ivareta skipets sikkerhet. Innenfor fartøyets SMS (Safety Management System) er det derfor avgjørende å ikke bare planlegge for totalt bortfall av signaler, men også for situasjoner der signalene er manipulerte (spoofing).
Når elektroniske forstyrrelser gjør GNSS upålitelig, trer beredskapsrutinene i kraft. Verktøykassen for en robust navigatør inkluderer:
Robust navigasjon handler ikke om å finne et ufeilbarlig system, men om å kombinere avansert teknologi som sensorfusjon med fundamentalt sjømannskap. Ved å forstå samspillet mellom atomsvingninger i rommet, atmosfæriske korreksjoner og geopolitiske realiteter, går man fra å være en passiv bruker til å bli en herre over teknologien.
Navigasjon er vitenskap. Sjømannskap er dømmekraft.
Utviklet for operativ sikkerhet til sjøs © 2026 Sikkerhet Om Bord AS

Vi har dekonstruert GNSS til sine minste bestanddeler – fra atomurenes relativistiske korreksjoner til de komplekse algoritmene i sensor-fusjon. Gjennom ni kapitler har vi sett hvordan teknologisk uavhengighet og operativ beredskap er blitt de viktigste pilarene for sikker navigasjon i et uforutsigbart geopolitisk landskap.
Sikkerhet handler ikke lenger om å ha dekning, men om å ha integritet. Som teknisk og operativt ansvarlige er vår viktigste oppgave å kombinere systemenes presisjon med en urokkelig evne til å verifisere sannheten før kritiske beslutninger tas.
Ekte resiliens bygges gjennom lag-på-lag-sikkerhet: fra kryptografisk autentisering i verdensrommet til manuelle plottinger på brua. Ved å forstå hele kjeden – fra fysikkens fundament til strategisk risikostyring – har du nå verktøyene som kreves for å operere trygt når teknologien utfordres.
Sikkerhet Om Bord — 2026
© 2026 SIKKERHET OM BORD AS
Med enerett. Innholdet er utviklet for pedagogiske formål innen maritim navigasjon og GNSS-sikkerhet.
Refererte Standarder:
ISO 31000 (Risikostyring)
IMO/SMS Retningslinjer
Galileo OSNMA Standard
Redaksjonelt utarbeidet og kvalitetssikret av Stian Aarhus
Teknisk støtte levert av Gemini AI.
Solstormer sender ladde partikler mot jorda som skaper turbulens i ionosfæren. Dette forsinker satellittsignalene og skaper "scintillasjon", som kan føre til at mottakeren mister låsingen på satellittene helt. Dette er spesielt utfordrende i nordområdene og under solmaksimum.
Les mer om atmosfæriske forstyrrelser i Kapittel 3.
Tid går raskere i svakere tyngdekraft og saktere ved høy hastighet. For satellitter gir dette en tidsforskjell på 38 mikrosekunder per døgn. Uten korrigering ville posisjonen feilet med over ti kilometer hver dag på grunn av lysets hastighet.
Se utregningen i Kapittel 6: Relativistisk Mekanikk.
GNSS-signaler er ekstremt svake når de når jordoverflaten – de tilsvarer lyset fra en lyspære i New York sett fra Los Angeles. Fordi signalstyrken er så lav, kan selv enkle støysendere overdøve de ekte signalene og slå ut navigasjonen over store områder.
Lær om sårbarhet og jamming i Kapittel 7.
Jamming er støy som blokkerer signalet helt. Spoofing er manipulasjon hvor falske signaler lurer mottakeren til å tro at den er et annet sted. Dette er farligere fordi det ofte skjer uten at navigatøren merker avviket umiddelbart.
Gå til Kapittel 7 for eksempler på elektronisk krigføring.
LEO (Low Earth Orbit) satellitter som Starlink sender signaler som er opptil tusen ganger sterkere enn tradisjonell GPS. Dette gir økt sikkerhet mot jamming og bedre nøyaktighet for autonome operasjoner og kritisk infrastruktur.
Les om LEO-revolusjonen i Kapittel 8.
Ved signalfall skal man umiddelbart skifte til sekundære metoder som Dead Reckoning (bestikknavigasjon) i ECDIS, radarplotting og visuelle peilinger. Det er kritisk å rapportere forstyrrelser til myndigheter og varsle andre fartøy i nærheten.
Se beredskapsplanen i Kapittel 9: Geopolitikk og Beredskap.
Klikk på begrepene for å gå til aktuelt kapittel i artikkelen
Mottakerens evne til selv å oppdage og fjerne feilaktige satellittsignaler.
→ Kapittel 4Relativistisk effekt som gjør at satellittklokkene går for fort i forhold til jorden.
→ Kapittel 6Bestikknavigasjon; beregning av posisjon basert på kurs og fart uten GNSS.
→ Kapittel 9